LeNet Handwritten Digit Recognition with a Back-Propagation Network(NIPS1989)[paper]
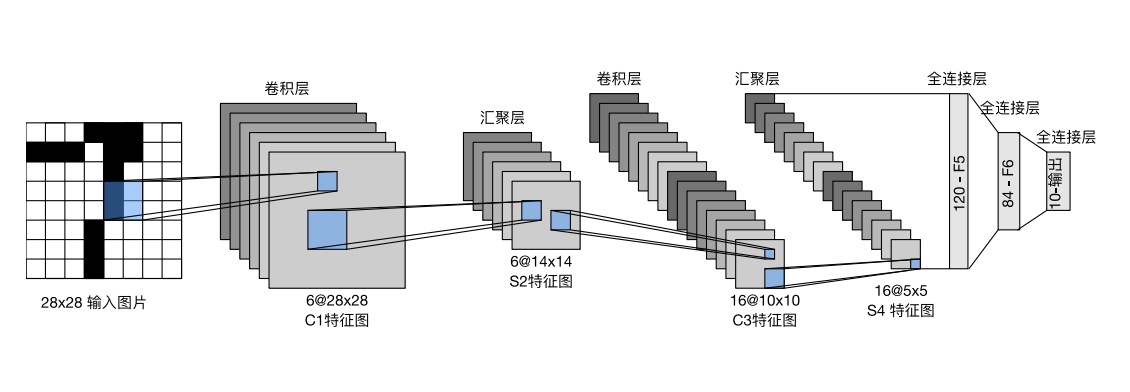
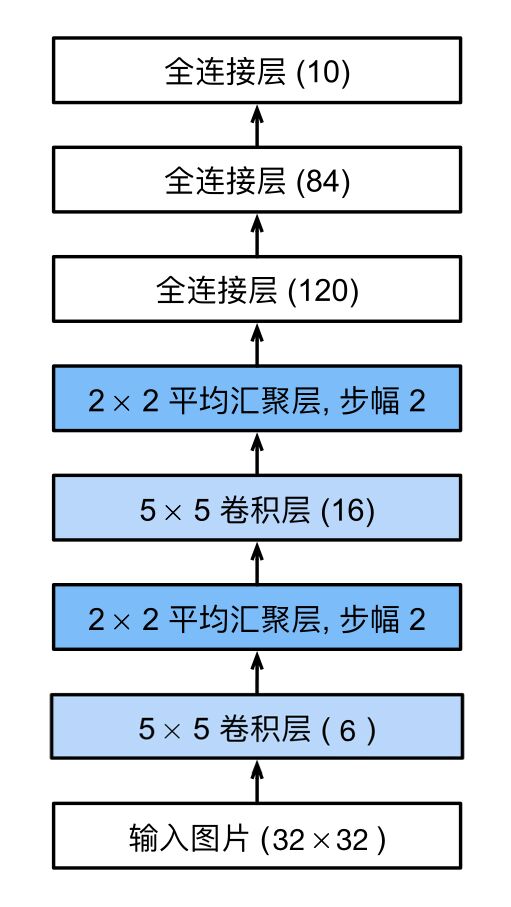
LeNet由2个卷积层和3个全连接层组成,每个卷积层之后有一个Sigmoid激活函数和一个AvgPool2d平均汇聚层,前两层全连接层之后也有一个Sigmoid激活函数。
LeNet模型图
LeNet网络架构图
基于pytorch实现LeNet网络的模型搭建如下:
模型建立
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 import torchimport torch.nn as nnimport torch.nn.functional as Fclass LeNet (nn.Module): def __init__ (self, in_channels, num_classes ): super (LeNet, self).__init__() """ num_classes:分类的数量 in_channels:原始图像通道数,灰度图像为1,彩色图像为3 """ self.num_classes = num_classes self.lenet = nn.Sequential( nn.Conv2d(in_channels, 6 , kernel_size=5 ), nn.Sigmoid(), nn.AvgPool2d(kernel_size=2 , stride=2 ), nn.Conv2d(6 , 16 , kernel_size=5 ), nn.Sigmoid(), nn.AvgPool2d(kernel_size=2 , stride=2 ), nn.Flatten(), nn.Linear(16 * 5 * 5 , 120 ), nn.Sigmoid(), nn.Linear(120 , 84 ), nn.Sigmoid(), nn.Linear(84 , num_classes)) def forward (self, x ): output = self.lenet(x) return output
模型检验 打印出各层的参数
1 2 3 4 5 6 7 num_classes = 10 in_channels = 3 X = torch.rand(size=(1 , in_channels, 32 , 32 ), dtype=torch.float32) net = LeNet(in_channels, num_classes) for layer in net.lenet: X = layer(X) print (layer.__class__.__name__,'output shape: \t' ,X.shape)
结果为:
1 2 3 4 5 6 7 8 9 10 11 12 Conv2d output shape: torch.Size([1, 6, 28, 28]) Sigmoid output shape: torch.Size([1, 6, 28, 28]) AvgPool2d output shape: torch.Size([1, 6, 14, 14]) Conv2d output shape: torch.Size([1, 16, 10, 10]) Sigmoid output shape: torch.Size([1, 16, 10, 10]) AvgPool2d output shape: torch.Size([1, 16, 5, 5]) Flatten output shape: torch.Size([1, 400]) Linear output shape: torch.Size([1, 120]) Sigmoid output shape: torch.Size([1, 120]) Linear output shape: torch.Size([1, 84]) Sigmoid output shape: torch.Size([1, 84]) Linear output shape: torch.Size([1, 10])
AlexNet ImageNet Classification with Deep Convolutional Neural Networks(NIPS2012)[paper]
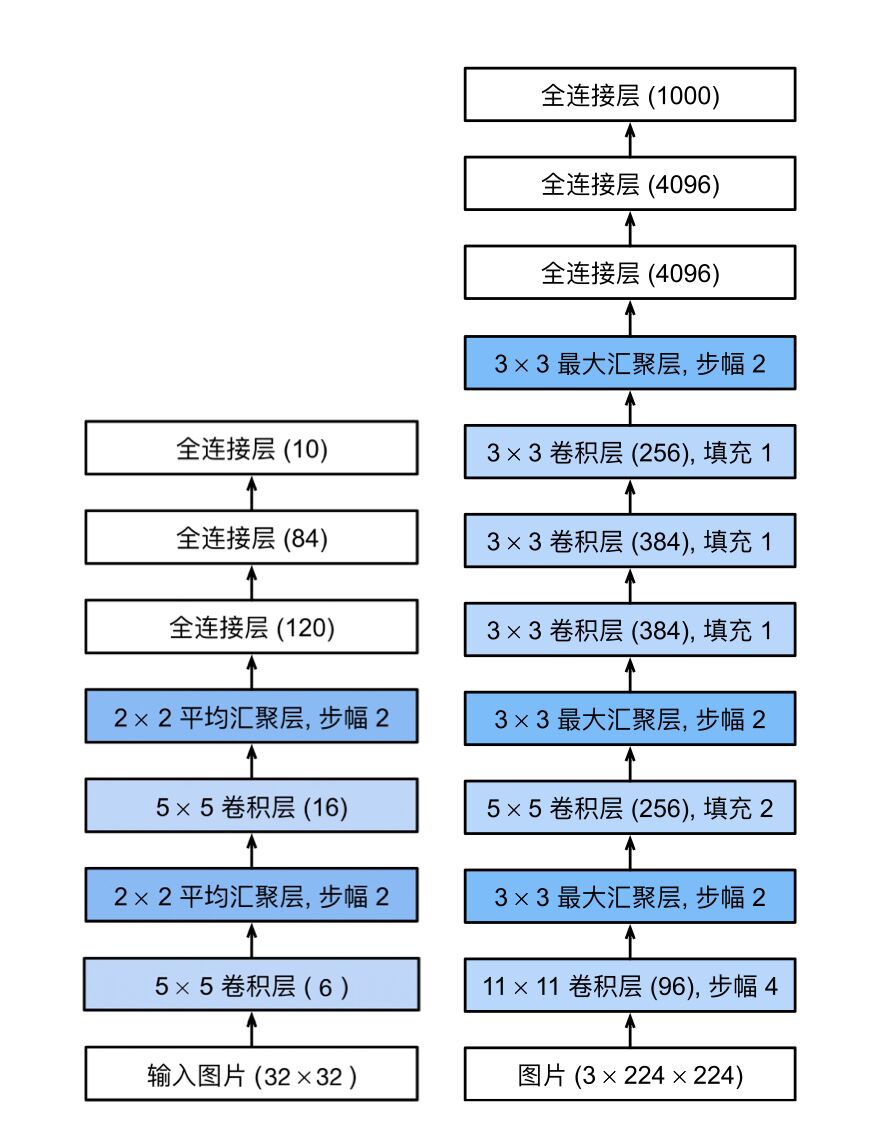
其具体网络架构如下:
LeNet架构图(左)AlexNet架构图(右)
基于pytorch实现AlexNet网络的模型搭建如下:
模型建立
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 import torchimport torch.nn as nnimport torch.nn.functional as Fclass AlexNet (nn.Module): def __init__ (self, in_channels, num_classes ): super (AlexNet, self).__init__() """ num_classes:分类的数量 in_channels:原始图像通道数,灰度图像为1,彩色图像为3 """ self.num_classes = num_classes self.lenet = nn.Sequential( nn.Conv2d(in_channels, 96 , kernel_size=11 , stride=4 , padding=2 ), nn.ReLU(), nn.MaxPool2d(kernel_size=3 , stride=2 ), nn.Conv2d(96 , 256 , kernel_size=5 , padding=2 ), nn.ReLU(), nn.MaxPool2d(kernel_size=3 , stride=2 ), nn.Conv2d(256 , 384 , kernel_size=3 , padding=1 ), nn.ReLU(), nn.Conv2d(384 , 384 , kernel_size=3 , padding=1 ), nn.ReLU(), nn.Conv2d(384 , 256 , kernel_size=3 , padding=1 ), nn.ReLU(), nn.MaxPool2d(kernel_size=3 , stride=2 ), nn.Flatten(), nn.Linear(256 * 6 * 6 , 4096 ), nn.ReLU(), nn.Dropout(p=0.5 ), nn.Linear(4096 , 4096 ), nn.ReLU(), nn.Dropout(p=0.5 ), nn.Linear(4096 , num_classes)) def forward (self, x ): output = self.lenet(x) return output
在第一次卷积操作时,不能完全遍历整个图像,应该在左、上添两列零,右、下添一列零能完全遍历;使用padding=2填充,在操作过程中会自动省去多余数据,故影响不大。
模型检验 打印出各层的参数
1 2 3 4 5 6 7 num_classes = 1000 in_channels = 3 X = torch.rand(size=(1 , in_channels, 224 , 224 ), dtype=torch.float32) net = AlexNet(in_channels, num_classes) for layer in net.lenet: X = layer(X) print (layer.__class__.__name__,'output shape: \t' ,X.shape)
结果为:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Conv2d output shape: torch.Size([1, 96, 55, 55]) ReLU output shape: torch.Size([1, 96, 55, 55]) MaxPool2d output shape: torch.Size([1, 96, 27, 27]) Conv2d output shape: torch.Size([1, 256, 27, 27]) ReLU output shape: torch.Size([1, 256, 27, 27]) MaxPool2d output shape: torch.Size([1, 256, 13, 13]) Conv2d output shape: torch.Size([1, 384, 13, 13]) ReLU output shape: torch.Size([1, 384, 13, 13]) Conv2d output shape: torch.Size([1, 384, 13, 13]) ReLU output shape: torch.Size([1, 384, 13, 13]) Conv2d output shape: torch.Size([1, 256, 13, 13]) ReLU output shape: torch.Size([1, 256, 13, 13]) MaxPool2d output shape: torch.Size([1, 256, 6, 6]) Flatten output shape: torch.Size([1, 9216]) Linear output shape: torch.Size([1, 4096]) ReLU output shape: torch.Size([1, 4096]) Dropout output shape: torch.Size([1, 4096]) Linear output shape: torch.Size([1, 4096]) ReLU output shape: torch.Size([1, 4096]) Dropout output shape: torch.Size([1, 4096]) Linear output shape: torch.Size([1, 1000])
AlexNet与LeNet不同
网络更深,使用8层网络进行训练
激活函数改进,使用ReLU替代Sigmoid,减少梯度消失现象
池化层采用Maxpool2d代替Avgpool2d,避免平均池化的模糊化效果,并且在池化的时候让步长比池化核的尺寸小,这样池化层的输出之间会有重叠和覆盖,提升了特征的丰富性
在全连接层处使用Dropout丢弃法,防止过拟合
在数据增强部分使用crop、PCA、加高斯噪声等
提出了LRN层,对局部神经元的活动创建竞争机制,使得其中响应比较大的值变得相对更大,并抑制其他反馈较小的神经元,增强了模型的泛化能力。
NiN Network in Network(ICLR2014)[paper]
NiN块 NiN块以⼀个普通卷积层开始,后⾯是两个$1 \times 1$的卷积层。这两个$1 \times 1$卷积层充当带有ReLU激活函数的逐像素全连接层。第⼀层的卷积窗口形状通常由用户设置,随后的卷积窗口形状固定为$1 \times 1$。
所以NiN块可以定义为:
1 2 3 4 5 6 7 8 9 10 11 12 import torchimport torch.nn as nndef nin (in_channels, out_channels, kernel_size, strides, padding ): nin_block = nn.Sequential( nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding), nn.ReLU(), nn.Conv2d(out_channels, out_channels, kernel_size=1 ), nn.ReLU(), nn.Conv2d(out_channels, out_channels, kernel_size=1 ), nn.ReLU()) return nin_block
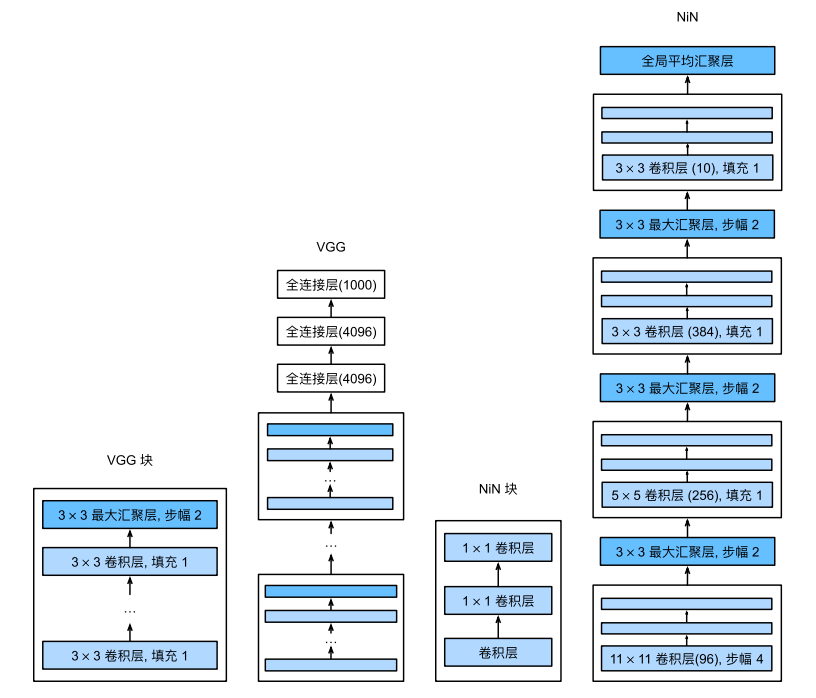
NiN块和NiN的架构如下:
VGG块及其网络架构(左)NiN块及其网络架构(右)
基于pytorch实现NiN网络的模型搭建如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 in_channels = 1 num_classes = 10 nin_net = nn.Sequential( nin(in_channels, 96 , kernel_size=11 , strides=4 , padding=0 ), nn.MaxPool2d(kernel_size=3 , stride=2 ), nin(96 , 256 , kernel_size=5 , strides=1 , padding=2 ), nn.MaxPool2d(kernel_size=3 , stride=2 ), nin(256 , 384 , kernel_size=3 , strides=1 , padding=1 ), nn.MaxPool2d(kernel_size=3 , stride=2 ), nn.Dropout(p=0.5 ), nin(384 , num_classes, kernel_size=3 , strides=1 , padding=1 ), nn.AdaptiveAvgPool2d((1 , 1 )), nn.Flatten())
模型检验 1 2 3 4 5 X = torch.randn(size=(in_channels, 1 , 224 , 224 )) net = nin_net for layer in net: X = layer(X) print (layer.__class__.__name__,'output shape: \t' ,X.shape)
结果为:
1 2 3 4 5 6 7 8 9 10 Sequential output shape: torch.Size([1, 96, 54, 54]) MaxPool2d output shape: torch.Size([1, 96, 26, 26]) Sequential output shape: torch.Size([1, 256, 26, 26]) MaxPool2d output shape: torch.Size([1, 256, 12, 12]) Sequential output shape: torch.Size([1, 384, 12, 12]) MaxPool2d output shape: torch.Size([1, 384, 5, 5]) Dropout output shape: torch.Size([1, 384, 5, 5]) Sequential output shape: torch.Size([1, 10, 5, 5]) AdaptiveAvgPool2d output shape: torch.Size([1, 10, 1, 1]) Flatten output shape: torch.Size([1, 10])
NiN和AlexNet之间的一个显著区别是NiN完全取消了全连接层。NiN使用的是一个NiN块,其输出通道数等于标签类别的数量。最后放一个全局平均汇聚层 ,生成一个对数几率 。
NiN设计的一个优点是,它显著减少了模型所需参数的数量,但是有时会增加训练模型的时间。
VGG Very Deep Convolutional Networks for Large-Scale Image Recognition(ICLR2015)[paper]
VGG块 VGG块与经典卷积神经网络一样,由一系列卷积层、激活函数和汇聚层组成,每一个VGG块只有卷积层个数、输入通道数和输出通道数不一样,所以,一个VGG块可以定义为:
1 2 3 4 5 6 7 8 9 10 11 12 import torchimport torch.nn as nndef vgg_block (num_convs, in_channels, out_channels ): layers = [] for _ in range (num_convs): layers.append(nn.Conv2d(in_channels, out_channels, kernel_size=3 , padding=1 )) layers.append(nn.ReLU()) in_channels = out_channels layers.append(nn.MaxPool2d(kernel_size=2 , stride=2 )) return nn.Sequential(*layers)
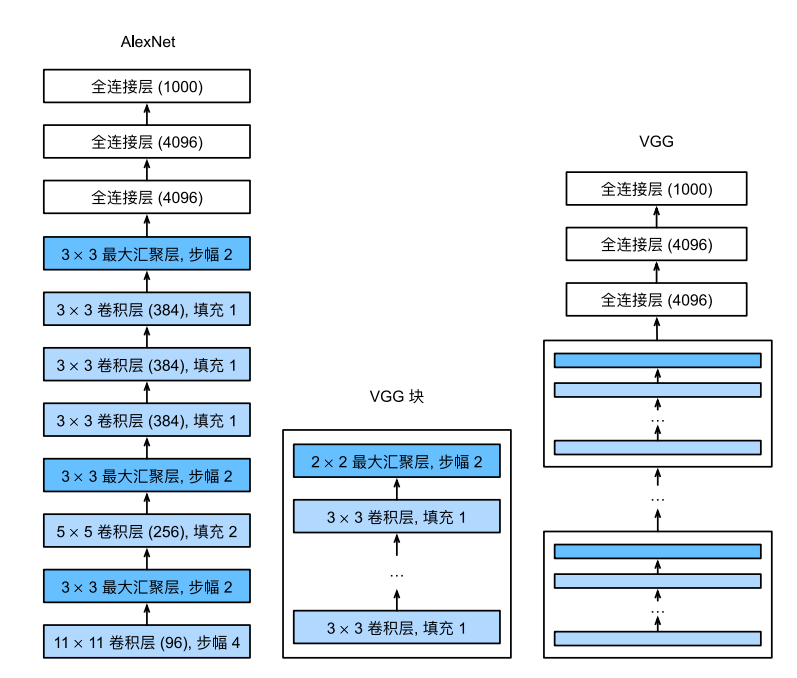
VGG神经网络就是由多个不同卷积层个数、输入通道数和输出通道数的VGG块共同组成卷积层,最后再连接3个全连接层组成整个神经网络,其架构如图所示:
AlexNet架构图(左)VGG块(中) VGG架构图(右)
基于pytorch实现VGG网络的模型搭建如下:
模型建立
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 def vggnet (conv, num_classes ): conv_layers = [] in_channels = 1 for (num_convs, out_channels) in conv: conv_layers.append(vgg_block(num_convs, in_channels, out_channels)) in_channels = out_channels net_vgg = nn.Sequential( *conv_layers, nn.Flatten(), nn.Linear(out_channels * 7 * 7 , 4096 ), nn.ReLU(), nn.Dropout(p=0.5 ), nn.Linear(4096 , 4096 ), nn.ReLU(), nn.Dropout(p=0.5 ), nn.Linear(4096 , num_classes), ) return net_vgg
定义不同的vgg块:
1 2 3 4 5 6 7 conv11 = ((1 , 64 ), (1 , 128 ), (2 , 256 ), (2 , 512 ), (2 , 512 )) conv13 = ((2 , 64 ), (2 , 128 ), (2 , 256 ), (2 , 512 ), (2 , 512 )) conv16 = ((2 , 64 ), (2 , 128 ), (3 , 256 ), (3 , 512 ), (3 , 512 )) conv19 = ((2 , 64 ), (2 , 128 ), (4 , 256 ), (4 , 512 ), (4 , 512 )) num_classes = 1000 net = vggnet(conv16, num_classes)
模型检验 构建一个高度和宽度为224的单通道数据样本,观察每个层输出的形状
1 2 3 4 X = torch.randn(size=(1 , 1 , 224 , 224 )) for layer in net: X = layer(X) print (layer.__class__.__name__,'output shape: \t' ,X.shape)
结果为:
1 2 3 4 5 6 7 8 9 10 11 12 13 Sequential output shape: torch.Size([1, 64, 112, 112]) Sequential output shape: torch.Size([1, 128, 56, 56]) Sequential output shape: torch.Size([1, 256, 28, 28]) Sequential output shape: torch.Size([1, 512, 14, 14]) Sequential output shape: torch.Size([1, 512, 7, 7]) Flatten output shape: torch.Size([1, 25088]) Linear output shape: torch.Size([1, 4096]) ReLU output shape: torch.Size([1, 4096]) Dropout output shape: torch.Size([1, 4096]) Linear output shape: torch.Size([1, 4096]) ReLU output shape: torch.Size([1, 4096]) Dropout output shape: torch.Size([1, 4096]) Linear output shape: torch.Size([1, 1000])
在经过每一个VGG块后,图像高宽减半,通道数增加。从上面四个VGG模型可以看到,无论是VGG多少,都有5个VGG模块,而且这五个模块仅仅是num_convs不一样,每一个模块对应的out_channels是一样的。
由于VGG所含有的卷积层更多,网络更深,所以计算量比AlexNet更大,计算也慢很多。
GoogLeNet Going Deeper with Convolutions(CVPR2015)[paper]
Inception块 在GoogLeNet中,最新的改进是新加入了基本卷积块Inception 块,网络架构开始出现分支,并不是一条线连到底。
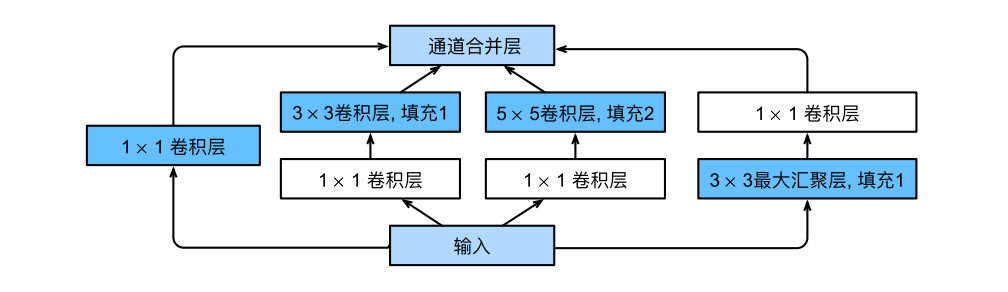
Inception 块有四条并行分支路径,前三条路径使用的卷积核大小为$1\times1$、$3\times3$和$5\times5$,从不同空间大小中提取信息。中间的两条路径在输入上执行$1\times1$卷积,以减少通道数,从而降低模型的复杂性。第四条路径使用$3\times3$最大汇聚层,然后使用$1\times1$卷积层来改变通道数。
这四条路径都使用合适的填充来确保输入与输出的高和宽一致,这样才能将每条线路的输出在通道维度上连结,并构成Inception块的输出。在Inception块中,通常调整的超参数是每层输出通道数。
Inception的架构为:
Inception块架构
Inception块定义为:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 import torchimport torch.nn as nnclass Inception (nn.Module): def __init__ (self, in_channels, c1, c2, c3, c4, **kwargs ): super (Inception, self).__init__(**kwargs) self.b1 = nn.Sequential( nn.Conv2d(in_channels, c1, kernel_size=1 ), nn.ReLU()) self.b2 = nn.Sequential( nn.Conv2d(in_channels, c2[0 ], kernel_size=1 ), nn.ReLU(), nn.Conv2d(c2[0 ], c2[1 ], kernel_size=3 , padding=1 ), nn.ReLU()) self.b3 = nn.Sequential( nn.Conv2d(in_channels, c3[0 ], kernel_size=1 ), nn.ReLU(), nn.Conv2d(c3[0 ], c3[1 ], kernel_size=5 , padding=2 ), nn.ReLU()) self.b4 = nn.Sequential( nn.MaxPool2d(kernel_size=3 , stride=1 , padding=1 ), nn.Conv2d(in_channels, c4, kernel_size=1 ), nn.ReLU()) def forward (self, x ): output1 = self.b1(x) output2 = self.b2(x) output3 = self.b3(x) output4 = self.b4(x) outputs = [output1, output2, output3, output4] return torch.cat(outputs, 1 )
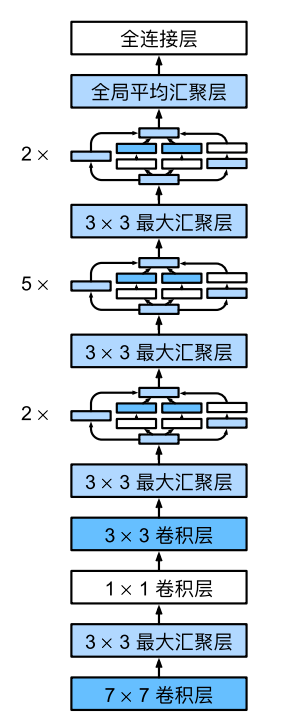
GoogLeNet模型 GoogLeNet是由一些基本的卷积核和9个Inception块进行卷积操作后连接一个全局平均汇聚层,最后再连接一个全连接层完成输出。
GoogLeNet的网络框架为:
GoogLeNet的网络框架
基于pytorch实现GoogLeNet网络的模型搭建如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 class GoogLeNet (nn.Module): def __init__ (self, in_channels, num_classes ): super (GoogLeNet, self).__init__() self.m1 = nn.Sequential( nn.Conv2d(in_channels, 64 , kernel_size=7 , stride=2 , padding=3 ), nn.ReLU(), nn.MaxPool2d(kernel_size=3 , stride=2 , padding=1 )) self.m2 = nn.Sequential( nn.Conv2d(64 , 64 , kernel_size=1 ), nn.ReLU(), nn.Conv2d(64 , 192 , kernel_size=3 , padding=1 ), nn.ReLU(), nn.MaxPool2d(kernel_size=3 , stride=2 , padding=1 )) self.m3 = nn.Sequential( Inception(192 , 64 , (96 , 128 ), (16 , 32 ), 32 ), Inception(256 , 128 , (128 , 192 ), (32 , 96 ), 64 ), nn.MaxPool2d(kernel_size=3 , stride=2 , padding=1 )) self.m4 = nn.Sequential( Inception(480 , 192 , (96 , 208 ), (16 , 48 ), 64 ), Inception(512 , 160 , (112 , 224 ), (24 , 64 ), 64 ), Inception(512 , 128 , (128 , 256 ), (24 , 64 ), 64 ), Inception(512 , 112 , (144 , 288 ), (32 , 64 ), 64 ), Inception(528 , 256 , (160 , 320 ), (32 , 128 ), 128 ), nn.MaxPool2d(kernel_size=3 , stride=2 , padding=1 )) self.m5 = nn.Sequential( Inception(832 , 256 , (160 , 320 ), (32 , 128 ), 128 ), Inception(832 , 384 , (192 , 384 ), (48 , 128 ), 128 ), nn.AdaptiveAvgPool2d((1 , 1 )), nn.Dropout(p=0.5 ), nn.Flatten()) self.googlenet = nn.Sequential(self.m1, self.m2, self.m3, self.m4, self.m5, nn.Linear(1024 , num_classes)) def forward (self, x ): x = self.googlenet(x) return x
模型检验 构建一个高度和宽度为224的单通道数据样本,观察每个层输出的形状
1 2 3 4 5 6 7 8 in_channels = 3 num_classes = 10 X = torch.randn(size=(1 , in_channels, 224 , 224 )) net = GoogLeNet(in_channels, num_classes) print (net(X))for layer in net.googlenet: X = layer(X) print (layer.__class__.__name__,'output shape: \t' ,X.shape)
结果为:
1 2 3 4 5 6 7 8 tensor([[ 0.0278, 0.0170, 0.0201, 0.0070, 0.0244, 0.0257, 0.0028, -0.0330, -0.0201, -0.0199]], grad_fn=<AddmmBackward0>) Sequential output shape: torch.Size([1, 64, 56, 56]) Sequential output shape: torch.Size([1, 192, 28, 28]) Sequential output shape: torch.Size([1, 480, 14, 14]) Sequential output shape: torch.Size([1, 832, 7, 7]) Sequential output shape: torch.Size([1, 1024]) Linear output shape: torch.Size([1, 10])
Inception块相当于⼀个有4条路径的⼦⽹络。它通过不同窗口形状的卷积层和最⼤汇聚层来并⾏抽取信息,并使⽤$1\times1$卷积层减少每像素级别上的通道维数从而降低模型复杂度。
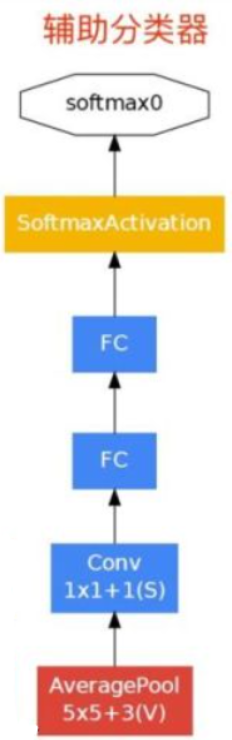
另外:GoogLeNet还在第四个大模块的第1个(Inception4a)和第4个模块(Inception4d)后添加辅助分类器:其架构如图:
GoogLeNet的辅助分类器的网络框架
实现如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 class Assisant (nn.Module): def __init__ (self, in_channels, num_classes ): super (Assisant, self).__init__() self.feature = nn.Sequential( nn.AvgPool2d(kernel_size=5 , stride=3 ), nn.Conv2d(in_channels, 128 , kernel_size=1 ), nn.ReLU(), nn.Flatten(), nn.Dropout(p=0.5 ), nn.Linear(2048 , 1024 ), nn.ReLU(), nn.Dropout(p=0.5 ), nn.Linear(1024 , num_classes)) self.fc1 = nn.Linear(2048 , 1024 ) self.fc2 = nn.Linear(1024 , num_classes) def forward (self, x ): x = self.feature(x) return x
辅助分类器仅在训练时使用,将3个分类器的损失函数加权求和,以缓解梯度消失现象。
Inception-v2 Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift(CVPR2016)[papr]
使用Batch Normalization,将输出归一化为N(0,1),可以采用较大的学习速率,加快收敛,且BN具有正则效应,不需要太依赖dropout,减少过拟合。
卷积分解,$5 \times 5$的卷积分解为两个$3 \times 3$的卷积,使网络更深,参数更少。
Inception-v3 Rethinking the Inception Architecture for Computer Vision[paper]
非对称分解卷积,将$n \times n$的卷积分解为两个$n \times 1$和$1 \times n$的卷积,使网络更深,参数更少。
设计了一个并行双分支的结构Grid Size Reduction来取代max pooling,边卷积边池化,最后再叠加,减少信息损失的同时减小参数量。
辅助分类器采用BatchNorm
四大设计原则:
在浅层不要过度降维或收缩特征
特征越多,收敛越快。
大卷积核之前用1 * 1卷积降维,信息不丢失
均衡网络中的深度和宽度
Inception-v4 Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning(AAAI2017)[paper]
引入了ResNet,使训练加速,性能提升。卷积时先加入1 * 1的卷积降维减少运算量
当滤波器的数目过大(>1000)时,训练很不稳定,提出了缩小因子解决残差块的不稳定现象(在inception之后先乘以缩小因子,然后和恒等映射相加)
Xception Xception: Deep Learning with Depthwise Separable Convolutions(CVPR2017)[paper]
在Inception-v3的基础上提出,基本思想是通道分离式卷积。模型参数稍微减少,但是精度更高。Xception卷积的时候要将通道的卷积与空间的卷积进行分离,先做1×1卷积再做3×3卷积,即先将通道合并,再进行空间卷积。
Xception使用了激活函数Relu
ResNet 初始ResNet Deep Residual Learning for Image Recognition(CVPR2016)[paper]
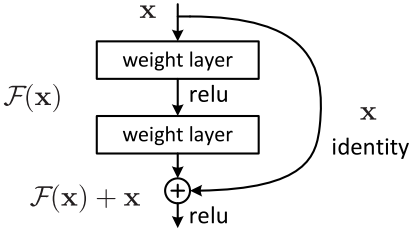
残差块
由于更深的网络极易导致梯度弥散,从而导致网络无法收敛。经测试,20层以上会随着层数增加收敛效果越来越差,ResNet 的核心思想则是采用了identity shortcut connection,构建了一个个残差块。残差块有两种连接方式,一种是input和output的size一样,直接相连;另一种是input和output的size不一样,要先通过一个卷积层conv去完成resize再进行相连。
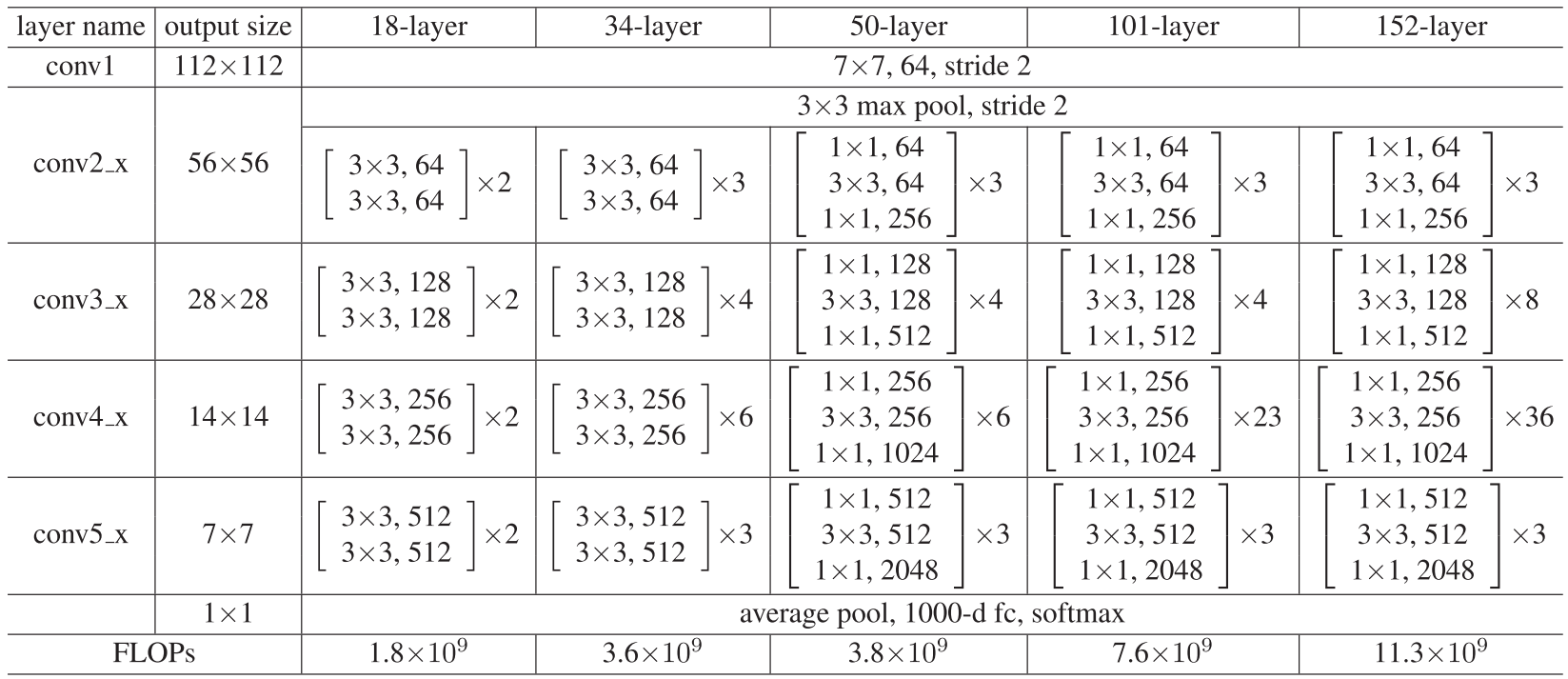
ResNet有以下几种:ResNet18、ResNet34、ResNet50、ResNet101、ResNet152
ResNet网络参数表
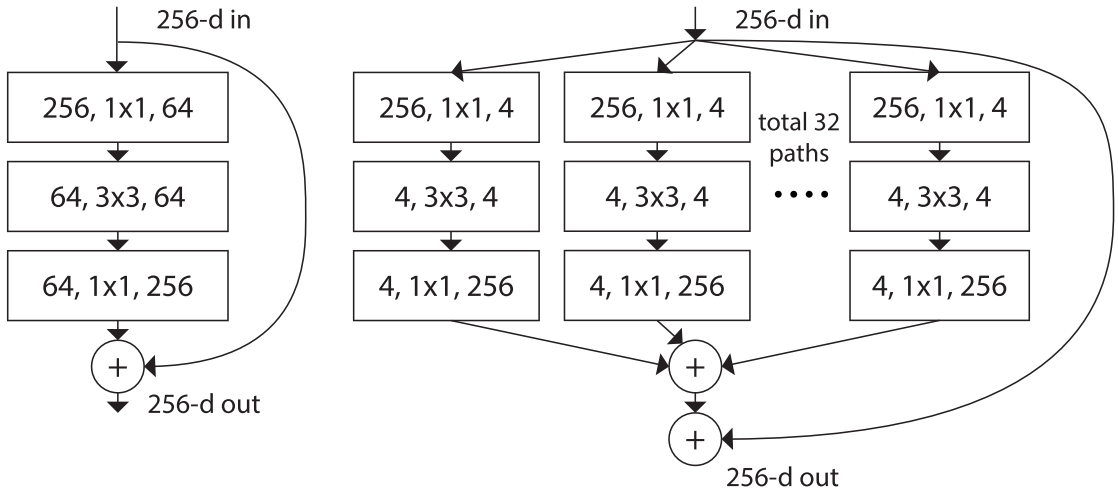
ResNet变种 ResNeXt Aggregated Residual Transformations for Deep Neural Networks(CVPR2017)[paper] [code]
增加网络深度,如从AlexNet到ResNet,但是实验结果表明由网络深度带来的提升越来越小
增加网络模块的宽度,但是宽度的增加必然带来指数级的参数规模提升,也非主流CNN设计
改善CNN网络结构设计,如Inception系列和ResNeXt等。且实验发现增加Cardinatity即一个block中所具有的相同分支的数目可以更好的提升模型表达能力
ResNeXt同样堆叠block,参考类似Inception的方式,使得ResNet更宽,每个block中每一个path都是相同的。
残差块
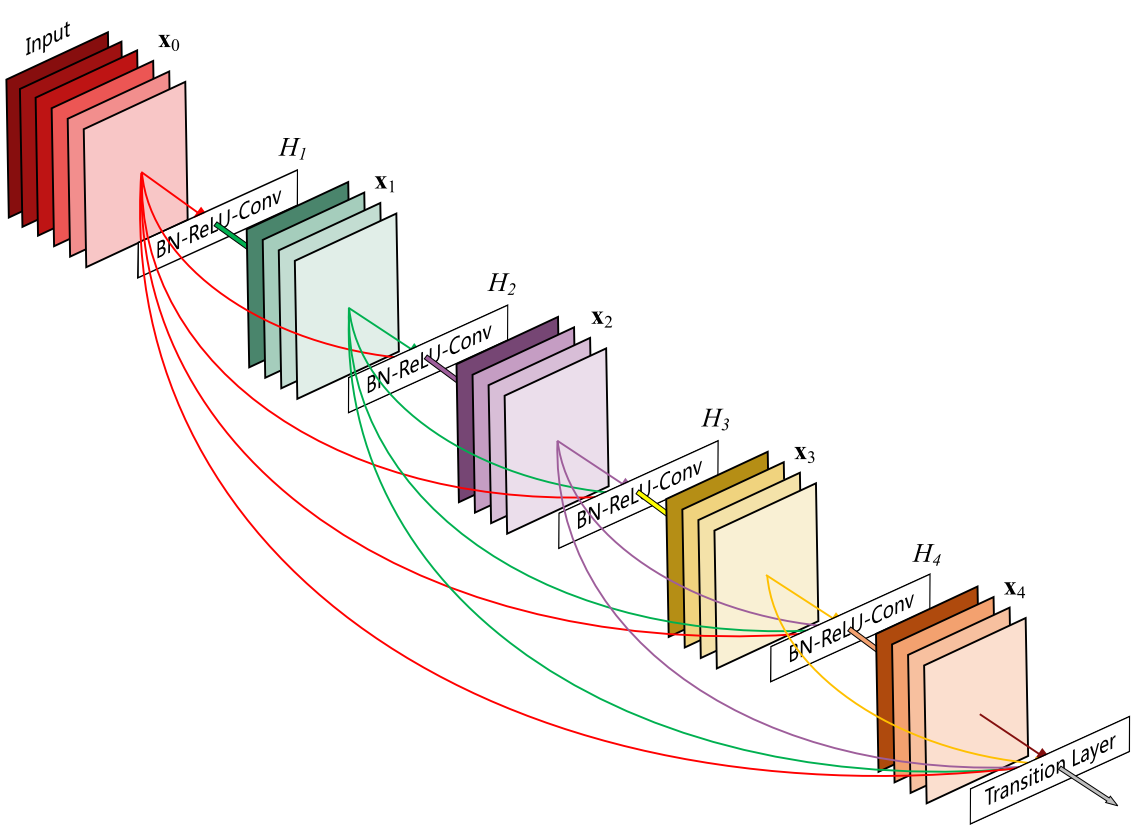
DenseNet Densely Connected Convolutional Networks(CVPR2017)[paper] [code]
DenseNet block
第$i$层的输入不仅与$i-1$层的输出有关,还与之前所有层的输出都有关。
由于需要对不同层的feature map进行cat操作,所以需要不同层的feature map保持相同的size,这就限制了网络中Down sampling的实现。所以同样采用不同的Denseblock,同一个Denseblock中feature size相同,在不同Denseblock之间进行Down sampling。
每一个Denseblock中提出了Growth rate的概念,即每个网络层输出的特征图数量K,决定着每一层需要给全局状态更新的信息的多少。
DenseNet接受较少的K,但由于不同层feature map之间由cat操作组合在一起,最终仍导致channel较大而成为网络的负担。所以使用1×1 Conv(Bottleneck)作为特征降维的方法来降低channel数量。
减轻了梯度消失
加强了feature的传递
更有效地利用了feature
一定程度上较少了参数数量
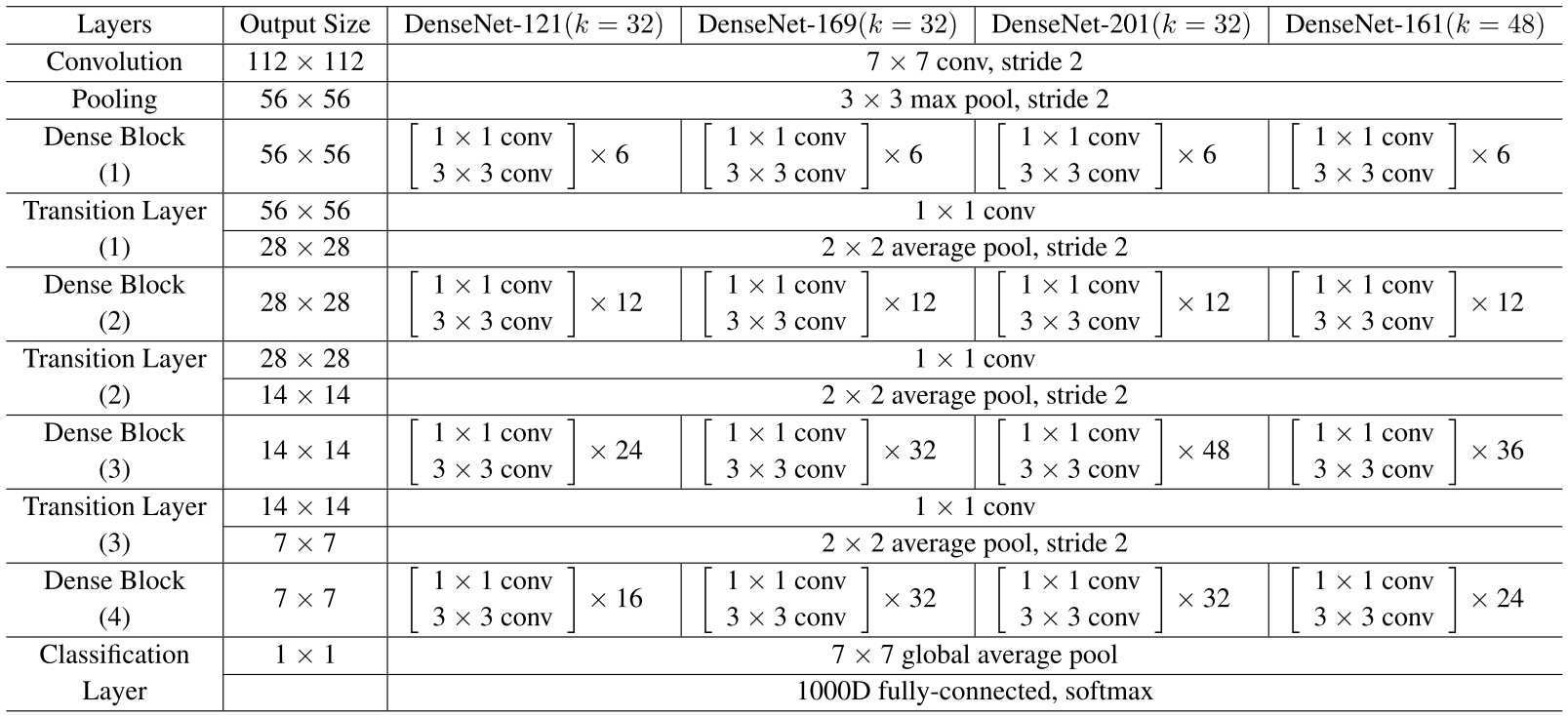
DenseNet有以下几种:DenseNet-121(k=32)、DenseNet-169(k=32)、DenseNet-201(k=32)、DenseNet-161(k=48)
DenseNet网络参数表
Res2Net Res2Net: A New Multi-scale Backbone Architecture(PAMI2021)[paper] [code]
ResNeSt ResNeSt: Split-Attention Networks(CVPR2022)[paper] [code]
SqueezeNet SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5MB model size(ICLR)[paper]
优化网络结构,如ShuffleNet
减少模型参数,如SqueezeNet
优化卷积操作,如MobileNet改变卷积操作、Winograd从算法角度优化卷积
提出FC,如SqueezeNet、LightCNN
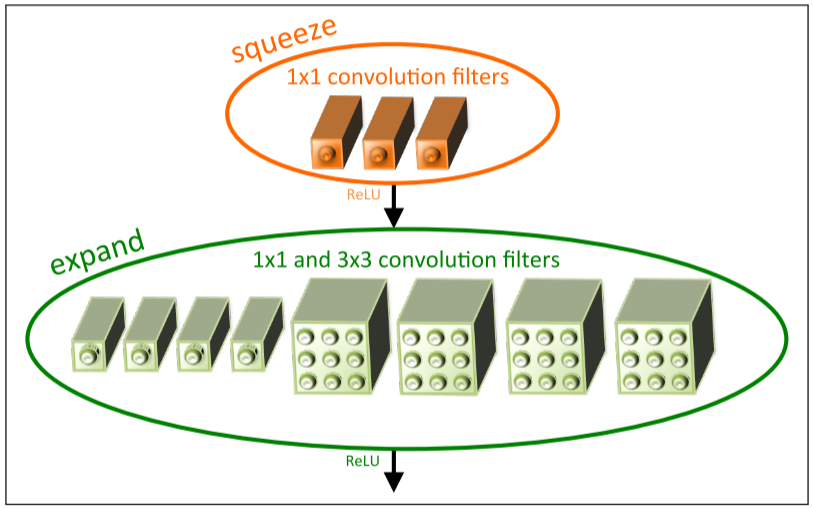
核心是提出fire module,分为两个部分squeeze和expend
fire module架构图
squeeze层是一组连续的$1 \times 1$卷积,expand层用一组连续的$1 \times 1$和一组连续的$3 \times 3$分别卷积,然后concatenation。SqueezeNet参数是Alexnet的1/50,经过压缩之后是1/510,但是准确率相当。
MobileNet V1 MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications(CVPR2017)[paper] [code]
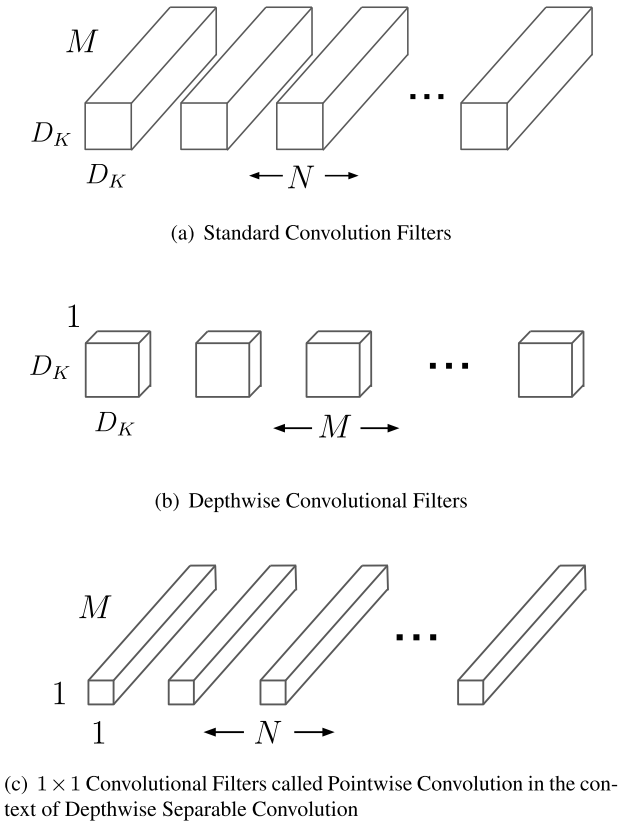
深度可分离卷积架构图
提出深度可分离网络(Depthwise Separable Convolution);引入两个参数,宽度超参数$\alpha$控制输入输出通道数;分辨率超参数$\beta$控制图像(特征图)分辨率。
Depthwise Separable Convolution由两部分组成:深度卷积(DW)和逐点卷积(PW)。
V2 MobileNetV2: Inverted Residuals and Linear Bottlenecks(CVPR2018)[paper] [code]
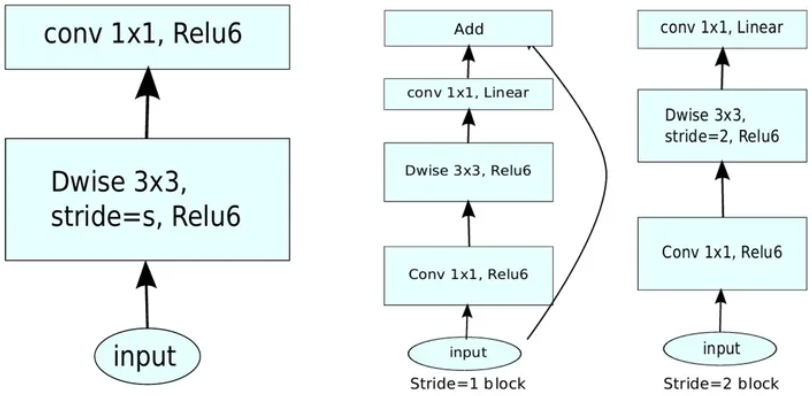
Inverted Residuals
深度卷积本身没有改变通道的能力,来的是多少通道输出就是多少通道。如果来的通道很少的话,DW深度卷积只能在低维度上工作,这样效果并不会很好,所以需要“扩张”通道。先在DW深度卷积之前使用PW卷积进行升维(升维倍数为t,t=6),再在一个更高维的空间中进行卷积操作来提取特征。先升维再卷积再降维,引入shortcut结构复用特征,此结构与残差块的先降维再卷积再升维刚好相反,所以叫做逆残差块。
最后的ReLU层改为Linear层,这是因为ReLU这种激活函数能有效增加特征的非线性表达,但是仅限于高维空间中,如果降低维度,再使用ReLU则会破坏特征,所以改用Linear层。
先进行$1 \times 1$卷积升维,再进行$3 \times 3$深度卷积提取特征,再通过Linear的逐点卷积降维。只有在步长为1时,将input与output相加,形成残差结构。步长为2时,因为input与output的尺寸不符,不添加shortcut结构,其余均一致。
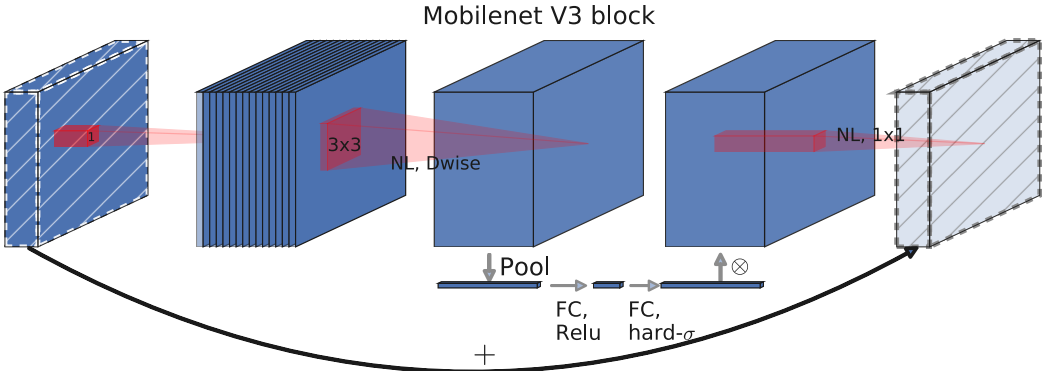
V3 Searching for MobileNetV3(ICCV2019)[paper] [code]
V3 block
保留V1中的深度可分离卷积和V2中的逆残差模块
引入SE结构的轻量级注意力模型,使用全局信息(全局池化)来增强有用的信息,同时抑制无用的信息(Sigmoid函数输出0、1),通过压缩、激励,调整每个通道的权重
用h-swish激活函数代替swish函数,减少运算量,提高性能
互补搜索技术组合:由资源受限的NAS执行模块集搜索,NetAdapt执行局部搜索(层级搜索Layer-wise Search)。
在V2的最后几层,把average pooling提前,提前把feature的size从$7 \times 7$降到了$1 \times 1$,延时减小了,但是精度却几乎没有降低。
ShuffleNet V1 ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices(CVPR2018)[paper]
提出逐点群卷积(pointwise group convolution)
提出通道混洗(channel shuffle)
V2 ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design(ECCV2018)[paper]
输入通道数与输出通道数保持相等可以最小化内存访问成本
分组卷积中使用过多的分组会增加内存访问成本
网络结构太复杂(分支和基本单元过多)会降低网络的并行程度
element-wise的操作消耗也不可忽略
EfficientNet EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks(ICML2019)[paper] [code]
SENet Squeeze-and-Excitation Networks(CVPR2018)[paper]
Squeeze: 使用global average pooling将每个二维的特征通道变成一个实数,使其某种程度上具有全局的感受野
Excitation:通过参数w来为每个特征通道生成权重,其中参数w被学习用来显式地建模特征通道间的相关性。两个FC层,先降维至1/16,再升维回原维度,然后通过一个Sigmoid的门获得0~1之间归一化的权重
Scale(Reweight):将归一化后的权重通过乘法逐通道加权到每个通道的特征上,完成在通道维度上的对原始特征的重标定。
SKNet Selective Kernel Networks(CVPR2019)[paper]


 微信
微信 支付宝
支付宝